Dans ce projet, vous construirez un agent logique basé sur la Logique Propositionnelle (LP0) capable de résoudre une variante du jeu "La Chasse au Wumpus". Cela nécessitera la construction de la base de connaissances de l'agent et l'implémentation des routines de recherche utilisées par l'agent pour la planification de ses actions.
Le code du projet consistera en plusieurs fichiers Python. Il vous faudra lire et comprendre certains de ceux-ci afin de mener à bien le projet, mais vous pourrez en ignorer d'autres.
Vous pouvez télécharger des éléments du code et des fichiers complémentaires à partir de l'archive zip.
Remarque : L'abbréviation AIMA utilisée dans la suite réfère à l'ouvrage Artificial Intelligence: A Modern Approach, 3rd Edition de Stuart Russell et Peter Norvig ainsi qu'au code Python correspondant, disponible sur GitHub (Toutefois, tous les fichiers requis pour le projet sont inclus dans l'archive zip).
wumpus_kb.py |
Code permettant de générer la base de connaissances de l'agent. Il vous faudra compléter la plupart des fonctions. |
wumpus_planners.py |
Code pour effectuer plan_route et
plan_shot. Il vous faudra compléter le code
pour implémenter les problèmes PlanRouteProblem et
PlanShotProblem. Voir search.py pour la classe parente
Problem et des exemples. |
wumpus.py |
Le fichier principal pour éxécuter la Chasse au Wumpus.
Comprend du code pour générer un
WumpusWorldScenario qui combine un code
WumpusEnvironment avec un agent (soit
Explorer soit HybridWumpusAgent). Inclut des programmes agents permettant de conduire
la partie "à la main" (avec ou sans base de connaissances).
Inclut également une interface en ligne de commande
__main__. |
wumpus_environment.py
| Implémente les principales classes
définissant l'environnement du Wumpus. L'agent
Explorer est un agent chasseur de Wumpus qui ne
dispose pas d'une base de connaissances. Le code WumpusEnvironment
implémente les aspects physiques et de gameplay de la
chasse au Wumpus. |
wumpus_agent.py |
Définit l'agent HybridWumpusAgent (qui
étend l'agent
Explorer). Cet agent dispose d'une base de
connaissances. Le code
agent_program implémente une hiérarchie
de réflexes qui sont exécutés selon les
perceptions et l'état de connaissance de l'agent. Cela inclut
des appels à plan_route et plan_shot
que vous implémenterez dans le programme wumpus_planners.py. |
logic.py |
Code issu d'AIMA implémentant des aspects de la Logique Propositionnelle (LP0) et de la Logique des Prédicats (LP1) et divers algorithmes d'inférence. Vous devrez vous intéresser à l'implémentation de la LP0. Remarque : fichier légèrement modifié par rapport à la version AIMA. |
search.py |
Code issu d'AIMA implémentant divers outils de
recherche ; inclut la classe
Problem que vous implémenterez dans wumpus_planners.py pour
plan_route et plan_shot. |
minisat.py |
Code pour implémenter l'interface vers CryptoMiniSat, incluant la traduction des clauses LP0 de type AIMA en CNF DIMACS, une interface pour appeler CryptoMiniSat, ainsi que la récupération des résultats de CryptoMiniSat. |
agents.py |
Code issu d'AIMA pour les agents et environnements génériques. |
utils.py |
Code issu d'AIMA fournissant une boîte à outils pour d'autres modules issus de AIMA. Remarque : fichier légèrement modifié par rapport à la version originale. |
Ce que vous avez à faire : Installer
CryptoMiniSat, compléter les fichiers
wumpus_kb.py et
wumpus_planners.py.
Rédiger un rapport sur le fonctionnement global du
programme. Soumettre l'ensemble du code sous forme d'une archive
Zip. Inclure dans le rapport un exemple d'exécution.
Obtenir de l'aide : Si vous bloquez sur quelque chose, n'hésitez pas à me contacter par mail.
Dans les commentaires de code et la documentation, j'utilise pour la base de connaissances les termes knowledge base, KB, kb et agent.kb. Il s'agit à chaque fois de la même chose : un outil global de stockage des formules propositionnelles.
J'uilise le terme axiomes pour me référer à des formules soumises à la KB pour permettre la mise à jour de l'état de connaissance de l'agent.
Lorsque des formules de la LP0 sont ajoutées à la KB, elles sont immédiatement converties en forme normale conjonctive FNC (ang. CNF). Cette représentation de type CNF est stockée dans la KB comme une liste des clauses disjonctives la composant (la liste est considérée implicitement comme la conjonction des clauses membres). Les clauses de la liste sont appelées collectivement clauses KB.
Ce projet utilise le solveur SAT CryptoMiniSat (https://www.msoos.org/cryptominisat5/). C'est à vous de trouver comment l'installer sur le système que vous utilisez. N'oubliez pas de le mentionner dans votre rapport.
Après avoir installé CryptoMiniSat, téléchargez l'archive Zip du projet (wumpus.zip), décompressez-la et placez-vous dans le répertoire wumpus. Vous pouvez tester la connexion à CryptoMiniSat en exécutant les instructions suivantes en ligne de commande :
python wumpus.py -t
Les trois test devraient bien se passer. Si ce n'est pas le cas, contactez-moi pour obtenir de l'aide.
L'étape suivante est de vous familiariser avec le jeu de Chasse au Wumpus. Exécutez l'instruction suivante en ligne de commande pour jouer :
python wumpus.py
Cela lance une interface en ligne de commande interactive, en mode
"Manuel" : vous avez le contrôle de l'agent chasseur de Wumpus.
En saisissant 'env', vous obtenez une
représentation de type ascii-art
de l'état courant de l'environnement du Wumpus. Par exemple,
lors du premier tick, vous verrez :
Scores: < Explorer >=0
0 1 2 3 4 5 time_step=0
|---|---|---|---|---|---|
| # | # | # | # | # | # | 5
|---|---|---|---|---|---|
| # | | | | | # | 4
|---|---|---|---|---|---|
| # | W | G | P | | # | 3
|---|---|---|---|---|---|
| # | | | | | # | 2
|---|---|---|---|---|---|
| # | ^ | | P | | # | 1
|---|---|---|---|---|---|
| # | # | # | # | # | # | 0
|---|---|---|---|---|---|
En haut, le score courant de l'agent chasseur de Wumpus (un
< Explorer > dans le
mode manuel par défaut).
Les coordonnées x de l'environnement du Wumpus sont
affichées sur la ligne au-dessus de la grille et les
coordonnées y sont affichées à côté de la
ligne à droite de la grille. Chaque cellule de la grille
représente une salle.
'#' représente un mur, et 'W', 'P', et 'G' représentent
le Wumpus, un Puit et l'Or (ang. Gold), respectivement. La position
de l'agent chasseur de Wumpus est représentée par '^', '>', 'v', et
'<', chaque symbole pointant dans la direction vers
laquelle l'agent est orienté. Au début, l'agent se
trouve à la position (1,1).
Vous pouvez entrer
'?' à n'importe quel moment pour voir une liste
complète des commandes.
Le but du jeu est d'obtenir le score le plus
élevé possible. Chaque mouvement coûte un point, tirer
une flèche (indépendamment du fait qu'elle tue le Wumpus
ou pas) coute 10 points et quitter la grotte (effectué en
exécutant la commande' Climb' à l'endroit
d'où l'agent était parti avec l'or (i.e.,
en ayant auparavant utilisé la commande 'Grab'
pour récupérer l'or)), permet d'obtenir
1000 points. Mourir, ce qui a lieu en arrivant dans un carré
ou se trouve le Wumpus ou un Puit, coute 1000 points.
A chaque étape de temps (tick), les perceptions courantes sont représentées par une liste de propositions ('~' représente le fait qu'une proposition est Fausse). Par exemple, à l'instant 0 (indiqué entre les crochets à gauche) les perceptions associées à l'environnement précédemment décrit sont :
[0] You perceive: ['~Stench', '~Breeze', '~Glitter', '~Bump','~Scream']
Jouez plusieurs parties afin de voir comment l'environnement du
Wumpus détermine les perceptions. Essayez de mourir en vous
déplaçant dans le carré du Wumpus ou un Puit. Tirez sur
le Wumpus : vous devrez pour cela exécuter 'Shoot'
tout en étant orienté face au Wumpus ; lorsque
l'opération est couronnée de succès, le Wumpus
meurt et à l'étape de temps suivante vous percevrez son
cri ('Scream') ; de plus, le Wumpus n'est, après cela,
plus représenté par un 'W', mais par un 'X'. Vous
pouvez à présent vous déplacer en toute
sécurité dans le carré du Wumpus.
Résolvez la partie en vous déplaçant sur l'Or, en
exécutant 'Grab', puis en revenant à
l'entrée/sortie et en exécutant 'Climb'.
Vous pouvez charger différents environnements en
spécifiant soit le nom d'un environnement existant dans le
répertoire wumpus/layouts/ (deux sont
fournis), soit en spécifiant le chemin vers un environnement,
en utilisant l'option de ligne de commande :
python wumpus.py -l 'wumpus_4x4_book'
(Vous pouvez, de façon optionnelle, spécifier l'extension '.lay'.) Le format d'une spécification d'environnement est très simple; en voici un exemple :
.,.,.,. W,G,P,. .,.,.,. A,.,P,.
Le format de fichier définit l'environnement du Wumpus comme une série de spécifications des salles, séparées par des virgules, chaque ligne représentant une ligne de salles dans l'environnement du Wumpus. '.' représente une salle vide, 'W' positionne un Wumpus (la base de connaissances que vous créerez ne pourra s'accommoder que de la présence d'un Wumpus exactement, ni plus, ni moins, mais dans le jeu manuel, il peut y avoir plusieurs Wumpi), 'P' positionne un Puit, 'G' positionne l'Or (la base de connaissances ne permettra de prélever qu'un et un seul Or) et 'A' marque la position de l'agent chasseur de Wumpus (l'orientation de l'agent est spécifiée séparément dans le code; Nord, ou '^', est l'orientation par défaut). Vous pouvez également ajouter des murs, representés par '#'. Par défaut, l'environnement spécifié sera automatiquement entouré de murs.
Jetez un coup d'oeil aux commentaires de code et aux exemples inclus
dans wumpus.py afin de voir comment
construire un WumpusWorldScenario à partir d'un fichier de
spécification d'environnement ; vous pouvez également
le spécifier directement dans le
code en construisant des objets et en les affectant à des
positions dans l'environnement du Wumpus.
Deux classes principales réalisent ensemble une
version fonctionnelle du jeu : la classe
WumpusEnvironment et une instance d'un agent sont
combinées dans une classe
WumpusWorldScenario, définie dans wumpus.py.
WumpusEnvironment, défini dans wumpus_environment.py,
représente l'environnement de la grotte du Wumpus, la position
et l'état de tous les objets et définit les
règles du jeu (la 'physique' du jeu), comme les effets des
actions de l'agent. La méthode step() fait
avancer le jeu d'une étape de temps et inclut un appel au
programme agent_program de l'agent chasseur de Wumpus.Explorer, également définie dans wumpus_environment.py,
fournit un squelette d'agent minimal, alors que la classe
HybridWumpusAgent, définie dans wumpus_agent.py,
est une implémentation complète d'un agent et inclut une
base de connaissances et un ensemble de réflexes suffisants
pour résoudre n'importe quelle partie de Chasse au Wumpus
(une fois que vous aurez complété le code).La principale action d'un agent chasseur de Wumpus a lieu dans le
programme
agent_program. Trois différents programmes
agent_program sont fournis :
with_manual_program (dans wumpus.py) prend un agent comme
entrée et remplace son agent_program avec un
agent_program "manuel" dans lequel l'agent attend des
commandes de ligne de commande à chaque étape. C'est
l'agent qui est exécuté lorsqu'on lance le jeu
à partir de la ligne de commande
(avec ou sans
l'option '-l' de fichier de spécification d'environnement):
python wumpus.pyCette version est très utile pour jouer au jeu et vérifier que vous comprenez la "physique" de l'environnement du Wumpus (i.e., les effets des actions sur les états du monde et les perceptions subséquentes).
with_manual_kb_program
(également dans wumpus.py) fonctionne de façon
similaire à
with_manual_program excepté que l'agent
crée une base de connaissance et que le programme
agent_program met à jour la base de connaissances
avec les perceptions et les actions sélectionnées (par
le joueur humain) à chaque étape. L'utilisateur peut
également soumettre n'importe quelle requête pertinente
à propos des propositions de la base de connaissances. Cette
option est très utile pour développer et
déboguer les axiomes que vous fournissez pour initialiser et
mettre à jour la base de connaissances. Cette version du
programme agent peut être lancée en exécutant la
commande suivante à partir de la ligne de commande (dans le
répertoire wumpus/) :
python wumpus.py -k(Vous pouvez également combiner cela avec l'option '
-l' pour charger une spécification
d'environnement particulière.) Une fois le programme lancé, saisir
'?' pour obtenir la liste des commandes et la liste
complète des types de requêtes disponibles.HybridWumpusAgent (HWA) est définie dans wumpus_agent.py (c'est une
sous-classe de la classe Explorer). La classe HWA
définit un programme
agent_program qui implémente l'agent chasseur de
Wumpus comme décrit dans la figure ci-dessous, issue de AIMA,
page 270.
wumpus_kb.py) et les classes
PlanRouteProblem et PlanShotProblem (dans
wumpus_planners.py), le programme
agent_program de la classe HWA pourra résoudre
toute instance résolvable du jeu de la Chasse au Wumpus. La
classe HWA et son programme
agent_program peuvent être exécutés en
ligne de commande (dans le répertoire wumpus/) en faisant :
python wumpus.py -y(Ceci peut être combiné avec l'option '
-l' ;
toutefois, l'option '-y' écrasera l'option '-k'
si elle est incluse). Lorsqu'il est exécuté, le
programme agent agent_program de la classe HWA
sélectionne toutes les actions ; l'utilisateur humain
n'à rien à faire, juste à regarder. Comme pour
les options précédentes, les sorties affichées
sont très détaillées, de façon à pouvoir
suivre l'exécution du programme étape par
étape.
Remarque : Bien qu'il vous soit possible de construire des spécifications d'environnement (que ce soit dans un fichier ou dans du code) de n'importe quelles dimensions, il est recommandé de respecter les contraintes suivantes (essentiellement en raison de l'utilisation d'une base de connaissances ; pour une partie manuelle sans KB, il n'y pas de contraintes) :
Les deux programmes agents avec lesquels vous travaillerez (se
trouvant dans
with_manual_kb_program, dans wumpus.py, ou dans la classe
HybridWumpusAgent (HWA) définie dans wumpus_agent.py) utilisent la base de connaissances PropKB_SAT. Celle-ci est
définie dans
wumpus_agent.py et
elle est une sous-classe de la classe PropKB
définie dans logic.py. Ces classes sont en fait très simples, implémentant la
méthode tell()
pour ajouter de nouveaux énoncés à la base de
connaissances, et la méthode
ask() pour requêter la base de connaissances
(ask() est une interface vers CryptoMiniSat). Les
assertions introduites dans la base de connaissance (sous la forme de chaînes de
caractères)
sont stockées dans le champ clauses de la KB, et
il s'agit juste d'une liste Python ! Les représentations des assertions
elles-mêmes sont construites en se basant sur l'implémentation
de la logique propositionnelle telle qu'elle est effectuée dans
AIMA. Comme vous implémenterez des générateurs
d'axiomes, il est important de comprendre comment des
énoncés propositionnels, initialement
exprimés sous la forme de chaînes de caractères, sont
convertis en représentations dans la LP0. Vous pouvez jeter
un coup d'oeil dans
logic.py. En particulier,
l'extrait suivant de l'invite Python illustre quelques
fonctionnalités de base.
In [1]: import logic In [2]: a = '(A & B) >> ( ~(C | D) <=> E )' In [3]: e = logic.expr(a) In [4]: e Out[4]: ((A & B) >> (~(C | D) <=> E)) In [5]: c = logic.to_cnf(e) In [6]: c Out[6]: ((~C | ~E | ~A | ~B) & (~D | ~E | ~A | ~B) & (E | C | D | ~A | ~B)) In [7]: logic.conjuncts(c) Out[7]: [(~C | ~E | ~A | ~B), (~D | ~E | ~A | ~B), (E | C | D | ~A | ~B)]
La ligne 2 exprime un énoncé propositionnel sous
la forme d'une chaîne de caractères, avec la syntaxe issue de
AIMA. Voir la classe Expr
dans logic.py. La fonction
expr()
analyse cette chaîne de caractères et construit une
Expr. L'objet Expr est conçu pour avoir une
représentation Python
"agréable", tel qu'illustré à la ligne 4
(ceci est réalisé par la définition de la méthode __repr__()
dans Expr ; voir cette
explication). Mais gardez présent à l'esprit qu'il
s'agit d'un objet ! Il a deux champs principaux : l'opérateur,
op, et la liste des arguments de l'opérateur,
args. Comme la variable
e référence l'Expr, nous pouvons examiner
op et args de la façon suivante :
In [10]: e.op Out[10]: '>>' In [11]: e.args Out[11]: [(A & B), (~(C | D) <=> E)]
Ceci montre que l'Expr à laquelle e
réfère a pour opérateur le symbole conditionnel,
et que ses args ont deux entrées, la première étant
l'antécédent, dans ce cas A
& B, et le deuxième le conséquent, ~(C | D)
<=> E. Chacun d'eux est également une Expr, la première
ayant l'opérateur de conjonction, '&', avec deux args
A et B. Ainsi, notre Expr initiale,
à laquelle réfère e, est en fait la
racine d'un arbre d'Expr, ce qui permet de représenter
des énoncés arbitrairement complexes.
Assurez-vous de consulter la documentation de Expr et
expr() dans logic.py afin de comprendre comment
la syntaxe en LP0 sera générée à partir d'une chaîne de
caractères, en particulier la remarque dans la documentation d'expr() à propos de l'ordre de priorité des
opérateurs : expr('P &
Q ==> R & S') est analysée en ((P & (Q >> R)) &
S), ce qui n'est peut-être pas ce qui était prévu
! Afin que l'ordre de priorité attendu soit respecté
(i.e., & prioritaire sur ==>), vous devez utiliser expr('(P & Q)
==> (R & S)'). En général, il est
conseillé d'utiliser des parenthèses pour faire
respecter la priorité que vous attendez.
Revenons à l'exemple initial. La ligne 5
convertit l'énoncé complet dans la LP0 en forme normale
conjonctive en utilisant la fonction
to_cnf() ; La ligne 6 montre le résultat.
Il s'agit encore d'un objet Expr ; de plus, il est
logiquement équivalent à la forme
apparaissant dans les lignes 2 et 4. Chaque fois qu'une Expr est
ajoutée à la KB à l'aide d'un
tell(), l'Expr est convertie en CNF. Ensuite, les
conjoints de la CNF sont obtenus ; ce qui est stocké
dans le store clauses de la KB est une liste des clauses
individuelles composant la CNF. C'est illustré à la ligne 7.
Finalement, une remarque à propos de l'utilisation de
CryptoMiniSat. CryptoMiniSat est un solveur SAT,
ce qui signifie qu'il cherche un modèle pour un ensemble de clauses
CNF, renvoie True si un tel modèle est trouvé ou False
si aucun modèle n'est trouvé. C'est très utile
mais insuffisant pour faire de l'inférence propositionnelle.
Dans notre cas, nous ne ferons pas de l'inférence
complète mais nous demanderons simplement au solveur si des propositions
données sont des conséquences logiques (True) ou non
(False) de la base de connaissances ou s'il est impossible de
répondre. Afin de déterminer dans lequel de ces trois
cas on se trouve, la méthode
ask() de PropKB_SAT effectue deux
appels à CryptoMiniSat, un dans lequel la variable de requête
(la proposition dont on essaie de déterminer la véracité) est supposée True, et un dans
lequel elle est supposée False, et dans chacun des cas,
CryptoMiniSat détermine si l'assertion postulée est
satisfaisable avec l'ensemble des clauses de la KB. Si l'ensemble clauses +
requête est satisfaisable dans les deux cas, alors cela
signifie que la KB ne permet pas de déterminer si la proposition
est True ou False. D'autre part, si un appel à CryptoMiniSat
est satisfaisable, mais l'autre non, alors la valeur de
vérité de la proposition est celle pour laquelle l'appel
est satisfaisable. Il est important de comprendre comment ça
marche.
OK, il est temps de se mettre au travail ! Les premières
tâches à effectuer consistent à implémenter les
générateurs d'axiomes pour la base de connaissances.
Pour cette partie du projet, vous travaillerez dans wumpus_kb.py, en rajoutant
votre code à tous les endroits indiqués par "*** YOUR CODE HERE ***".
Vous remarquerez que les noms de toutes les méthodes que vous
implémenterez commencent par "axiom_generator_...". Les chaînes
doc de ces fonctions décrivent les connaissance à
énoncer en LP0, avec une explication de ce que
représentent les arguments de la fonction. Les valeurs
retournées doivent être des chaînes de caractères
représentant les assertions dans la LP0.
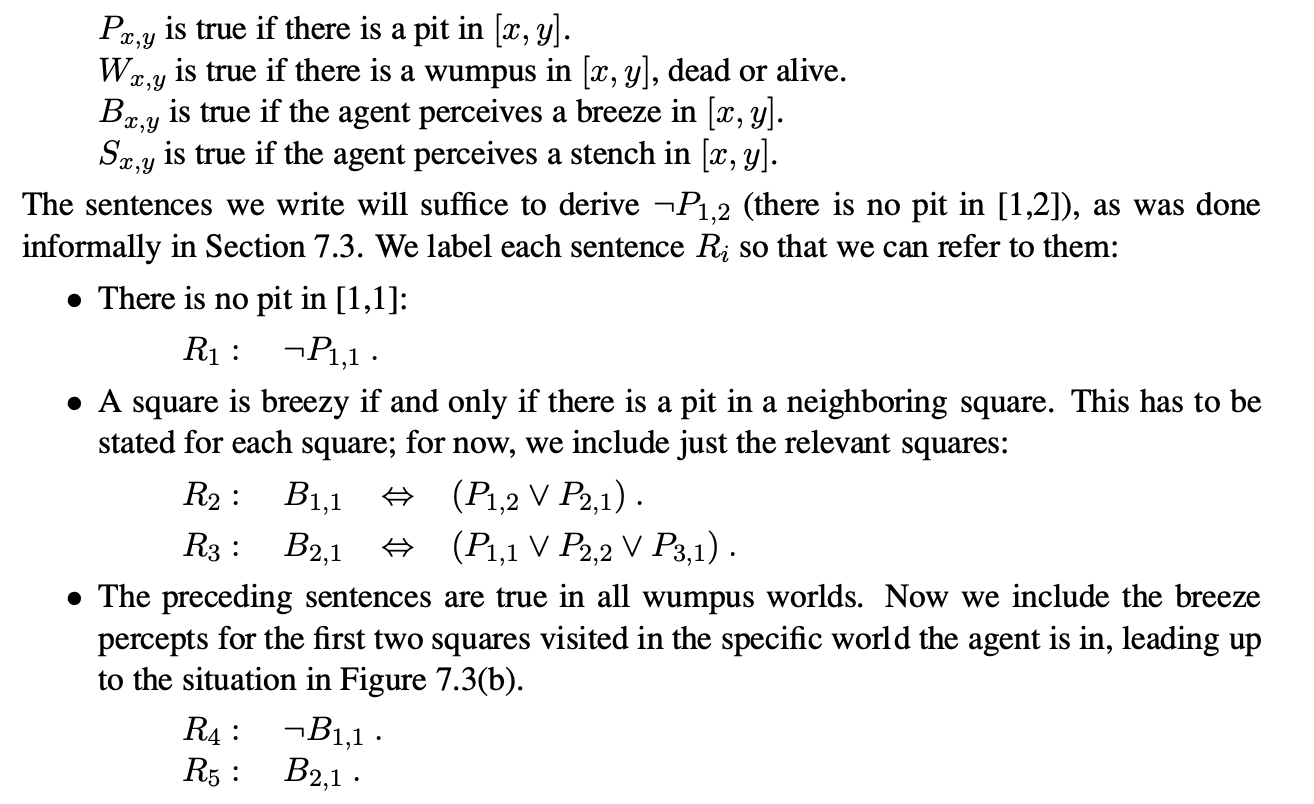
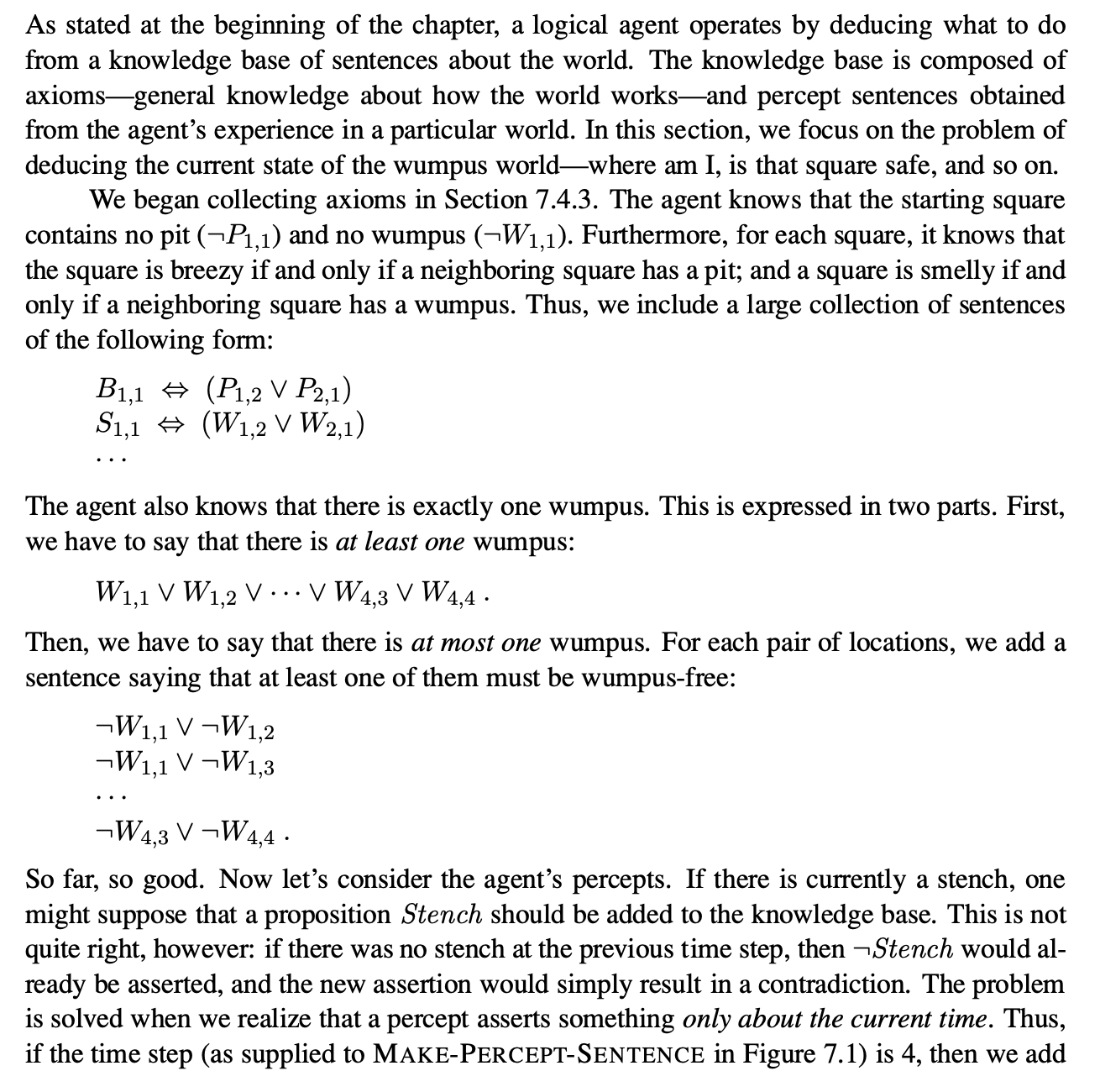
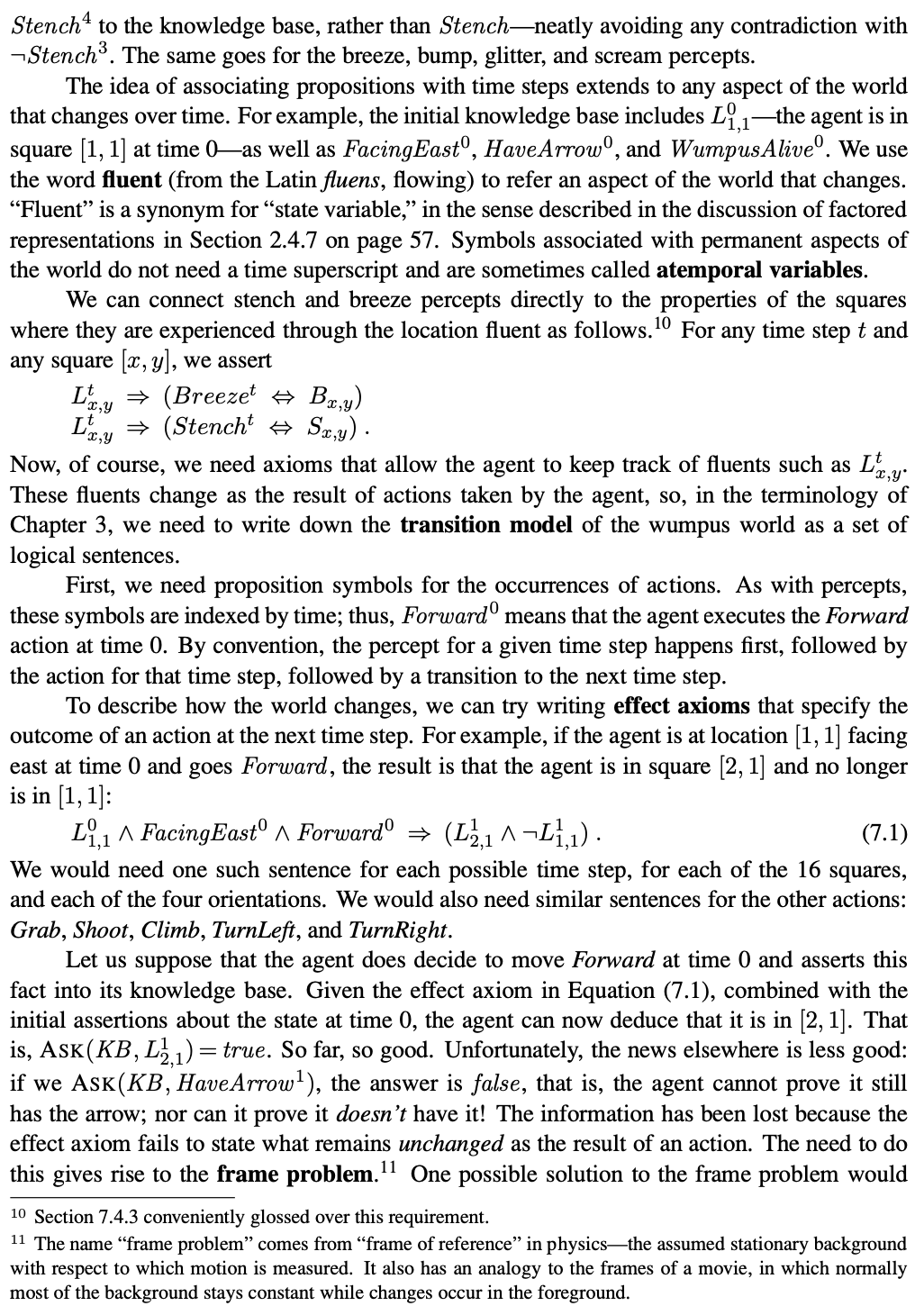
Les extraits suivant des sections 7.2, 7.4 et 7.7 de AIMA sont un bon guide pour certains axiomes que vous aurez à implémenter. Mais attention, il y en a d'autres !

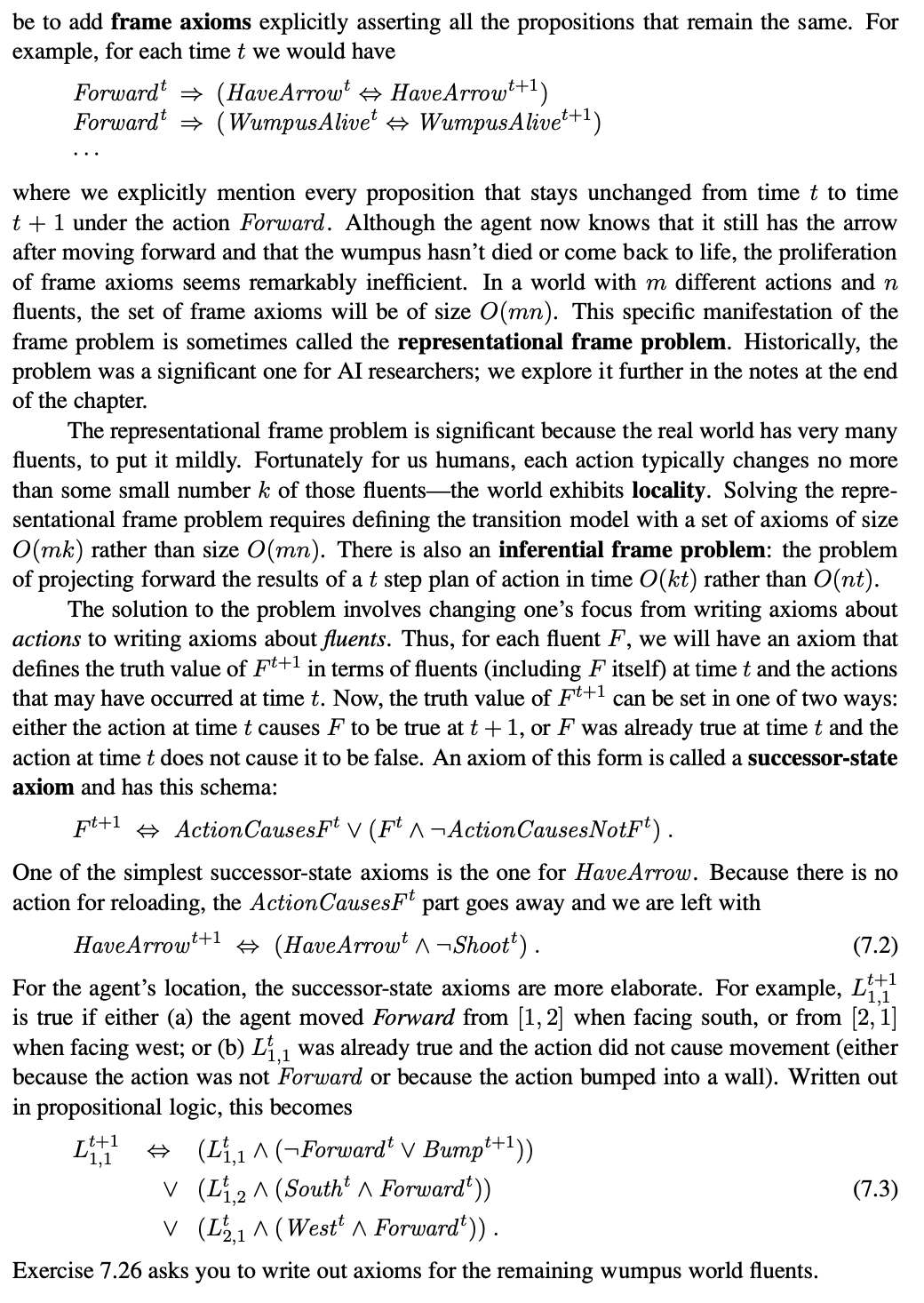
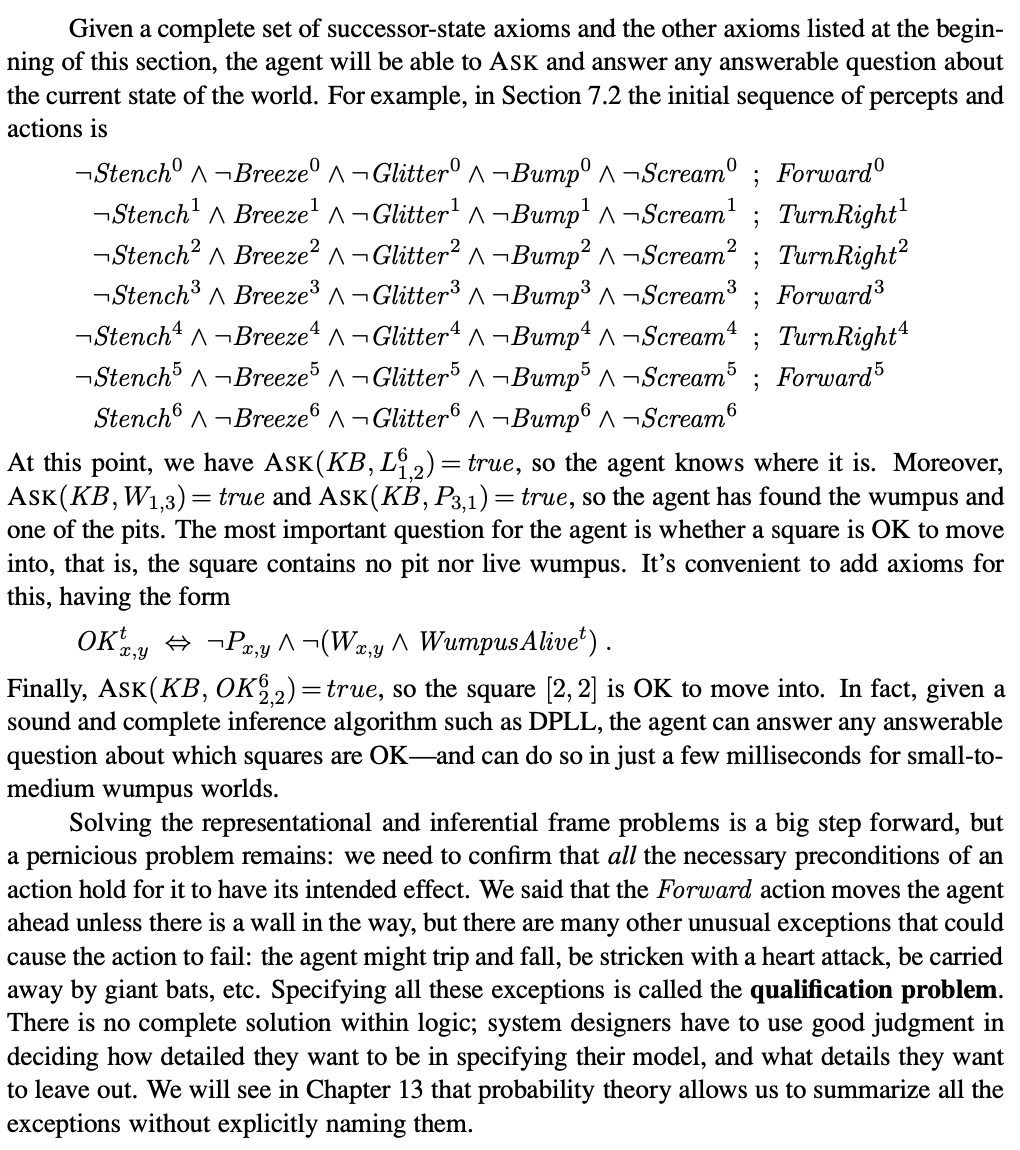
En plus du générateur d'assertions de perceptions courantes (qui convertit les vecteurs de perceptions en énoncés propositionnels sur les perceptions), il y aura deux classes générales de générateurs d'axiomes à construire : un ensemble qui génère les axiomes décrivant l'état de connaissance initial et un ensemble qui génère des axiomes qui représentent les changements intervenant au fil du temps.
Les assertions faites par vos générateurs seront
construites à partir de propositions. La première
section de wumpus_kb.py définit
toutes les propositions qui apparaitront dans la KB. Comme il est
très facile d'ajouter un symbole propositionnel mal formé
à la KB sans le savoir, des fonctions
constructeurs de chaînes de caractères propositionnelles, une
pour chaque type de proposition, sont fournies.
Vous travaillerez beaucoup avec les chaînes de caractères dans cette partie du projet. Voici quelques fonctions Python sur les chaînes qui pourront vous être utiles :
'a' + 'b' donne 'ab'join est très pratique ;
la chaîne sur laquelle est appelé le join
sera insérée entre les chaînes listées dans celui-ci (utiliser une chaîne vide pour simplement concaténer
la liste de chaînes) :
''.join(['a','b','c']) donne
'abc''-'.join(['a','b','c']) donne 'a-b-c'format vous sera utile : 'string
with {0}{1}'.format('stu', 'ff')'string
with stuff'En termes de notation, les point seront alloués, pour une implémentation correcte, de la façon suivante (pour un total de 24 points):
axiom_generator_percept_sentence = 1 ptaxiom_generator_initial_location_assertions = 0.5 ptaxiom_generator_pits_and_breezes = 1 ptaxiom_generator_wumpus_and_stench = 1 ptaxiom_generator_at_least_one_wumpus = 1 ptaxiom_generator_at_most_one_wumpus = 1 ptaxiom_generator_only_in_one_location = 1 ptaxiom_generator_only_one_heading = 1 ptaxiom_generator_have_arrow_and_wumpus_alive = 0.5 ptaxiom_generator_location_OK = 1 ptaxiom_generator_breeze_percept_and_location_property = 1 ptaxiom_generator_stench_percept_and_location_property = 1 ptaxiom_generator_at_location_ssa = 4 ptsaxiom_generator_have_arrow_ssa = 1 ptaxiom_generator_wumpus_alive_ssa = 1 ptaxiom_generator_heading_{north,east,south,west}_ssa = 3 pts
(pour l'ensemble)axiom_generator_heading_only_{north,east,south,west} = 2 pts
(pour l'ensemble)axiom_generator_only_one_action_axioms = 2 ptsRemarque : Pendant que vous construisez les
générateurs d'axiomes de la base de connaissances, celle-ci doit
rester satisfaisable. Si elle devient
insat, cela signifie que quelque chose que vous avez ajouté
conduit à une contradiction. Afin de vérifier la
satisfaisabilité de la KB, appelez la fonction minisat() dans wumpus_agent.py sur les
clauses KB, en faisant par exemple
minisat(kb.clauses); lorsque vous exécutez
wumpus.py avec une KB (option -k) à partir de la
ligne de commande, vous pouvez saisir la commande 'kbsat'
pour faire de même . Notez toutefois que le fait que la KB soit
satisfaisable ne signifie pas qu'il n'y a pas d'autres problèmes.
La deuxième tâche importante du projet est de
compléter l'implémentation du plan de route et de tir
pour l'agent chasseur de Wumpus hybride. Votre code prendra place dans wumpus_planners.py.
La documentation pour plan_route et plan_shot
décrivent le problème, mais le code à
compléter sera dans les classes
PlanRouteProblem et PlanShotProblem, qui étendent toutes deux la classe Problem
(definie dans search.py)
qui sert d'interface au programme de recherche d'AIMA.
Le goal_test pour les deux problèmes renvoie
initialement toujours True, et plan_route et
plan_shot renvoient des listes d'actions vides si aucune
solution n'est trouvée. Cela vous permet d'exécuter
l'agent chasseur de Wumpus hybride complet avant que les outils de
planification soient implémentés, mais vous aurez bien
évidemment à modifier cela.
Une fois implémentées, plan_route et
plan_shot utiliseront l'implémentation AIMA de
l'algorithme A*, qui est définie dans search.py (comme
astar_search()).
Il est recommandé d'implémenter la classe PlanRouteProblem
d'abord, car une grande partie de celle-ci pourra être réutilisée pour
PlanShotProblem. Pour
PlanShotProblem, vous avez uniquement à
planifier un chemin vers la position la plus proche dans laquelle
vous serez face au Wumpus.
Comme noté dans plan_route et
plan_shot, la représentation d'un état est
un triplet représentant les coordonnées x, y
et l'orientation de l'agent. L'orientation est un entier parmi 0,
1, 2, ou 3, représentant le Nord, l'Ouest, le Sud et l'Est respectivement.
Les buts et les états autorisés, toutefois, ne prennent
pas en compte l'orientation et sont ainsi juste des listes de tuples
x,y. La fonction manhattan_distance_with_heading()
est fournie ; comme son nom l'indique, elle calcule la distance de
Manhattan en prenant en compte le coût lié au changement d'orientation
(pour s'orienter correctement) avant de suivre le
chemin de Manhattan.
L'implémentation correcte de chaque problème de recherche vaut 4 points chacune, pour un total de 8 points.
Votre note globale (sur 40) vous sera communiquée. En termes d'évaluation de l'UE sur 20, votre note finale sera obtenue en divisant par deux la note sur 40 puis en combinant le résultat avec la note de TP Prolog.